

Gagner en rendement à moindre frais
Gagner en rendement à moindre frais
C'est la stratégie du guide de montagne

Temps de lecture : 9 minutes.
Cette newsletter hebdomadaire est envoyée à ses 2 676 abonnés.
Salut à tous,
En 1965, une loi prophétique proposée a été proposée par Gordon E. Moore, l’un des fondateurs de la société Intel.

Selon cette loi — qui s’est avérée d’une robustesse extraordinaire — les processeurs de nos ordinateurs sont conçus pour voir leur puissance de calcul suivre une courbe exponentielle.
Je ne rentrerai pas dans les détails qui sous-tendent cette loi, puisque mes connaissance s’arrêtent ici.
Et je ne m’appesantirai pas non plus sur l’évidente impossibilité physique de cette loi de se perpétuer pour toujours, puisque les courbes exponentielles tendent par défaut vers l’infini. Et que l’infini est par défaut physiquement impossible sur notre planète.
Cette newsletter n’est donc pas un papier vulgarisateur de cette loi.
Mais j’ai quand même souhaité entamer cette newsletter par son évocation.
Si je l’ai fait, c’est parce que la tournure qu’a pris dernièrement la loi de Moore (qui est encore valable) me parle beaucoup, et pourrait largement être reprise dans l’industrie automobile.
Ce qui m’intéresse dans sa version actuelle, c’est qu’elle a connu un virage paradigmatique :
Jusqu’à récemment, ce qui permettait l’augmentation exponentielle de la puissance de calcul des processeurs était dans la miniaturisation toujours plus extrême des transistors qui équipaient ces processeurs. En divisant leur taille, on pouvait donc en mettre plus sur une même surface, et ainsi augmenter les puissance de calcul.
Mais il semblerait qu’on s’approche de notre capacité maximale de miniaturisation des transistors. Et à la place, ce qui permet aujourd’hui d’augmenter la puissance de calcul des processeurs est dans l’optimisation de leur rendement.
Cette évolution me semble très inspirante.
Car elle montre qu’une autre voie est possible. Une voie où, plutôt que de vouloir absolument faire rentrer autant de performances que possible dans un système, on peut aussi chercher à piloter intelligemment ce système.
C’est exactement ce que je cherche à faire dans la conception des différentes briques technologiques que nous proposons chez Ambre : tirer le meilleur profit de l’existant, plutôt que d’escalader toujours plus dans les performances brutes.
Par exemple, c’est en cherchant des inspirations de stratégies de commande pour maximiser le rendement d’un moteur électrique que je suis tombé sur l’étude dont j’aimerais vous parler aujourd’hui.
Le genre d’étude qui permet de gagner presque 10% en rendement.
Et ce, seulement en pilotant un moteur électrique de sorte à éduquer son système de commande à la dynamique du véhicule électrique qu’il propulse.
La carte de rendement
Aujourd’hui, quand on parle d’optimisation du rendement d’un véhicule électrique, on parle d’abord des cartes de rendement de sa chaîne de traction.
Donc si l’on fait référence au rendement du moteur par exemple, on cherche à tracer une carte comme celle-là :
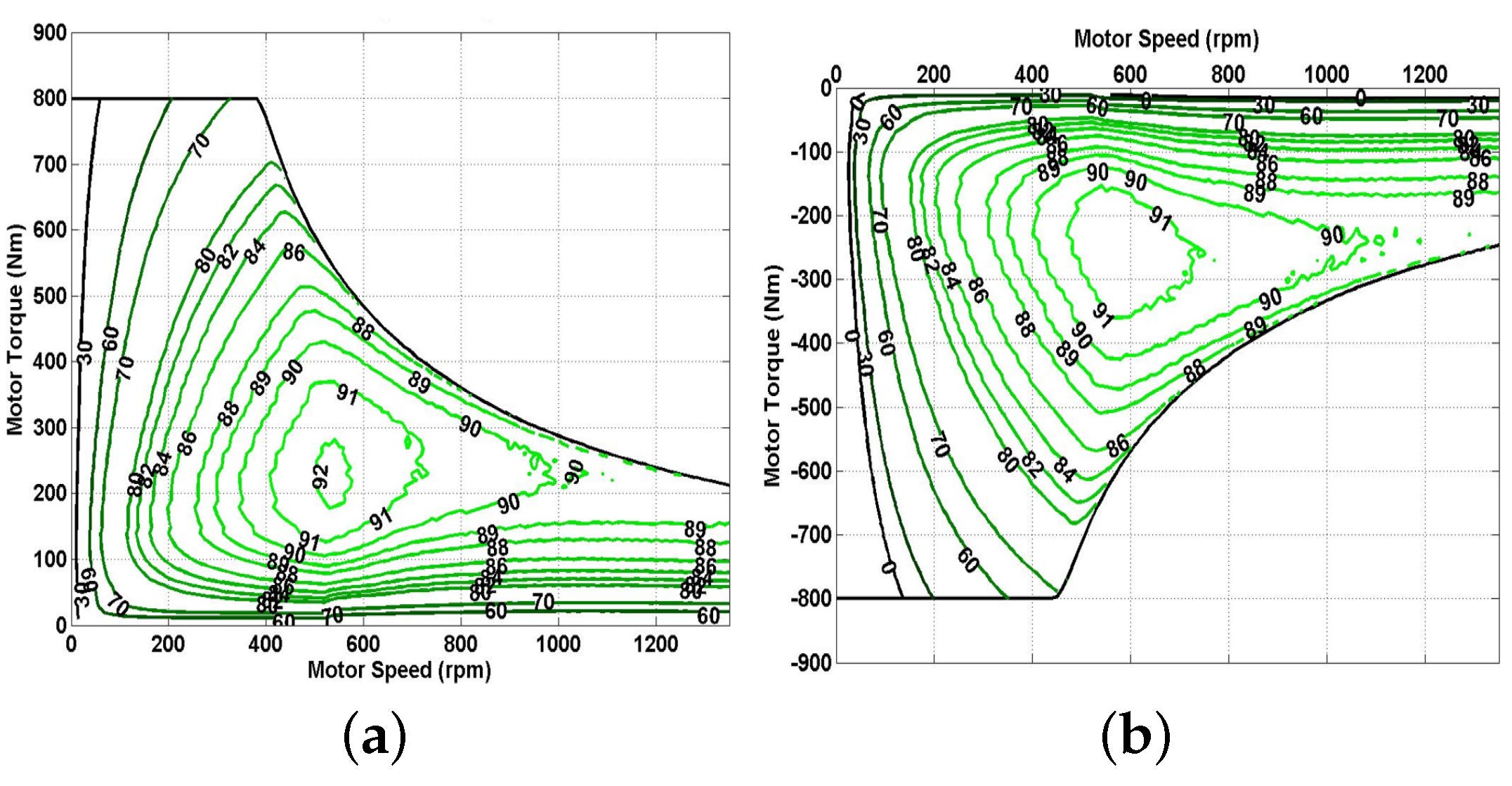
Cette carte a été tirée de l’étude dont je vais traiter aujourd’hui, et elle se lit comme une carte topographique.
C’est-à-dire qu’on commence par chercher à se positionner sur la carte, en fonction des coordonnées qui nous intéressent.
Sur la carte topographique d’une montagne que l’on souhaite gravir, ces coordonnées sont renseignées par notre position GPS, qui contient les information de longitude et de latitude de notre localisation. Lorsqu’on a cette position, on peut alors chercher l’altitude qui est la nôtre, en lisant les courbes de niveau.
Pour la carte de rendement, c’est strictement le même principe.
Disons que l’on souhaite faire fonctionner notre moteur en un point de fonctionnement de 600 tr/min et 300 Nm.
On se réfère alors à la carte de rendement qui est fournie par le constructeur du moteur, et on apprend qu’il affiche un rendement de 91% en ce point de fonctionnement.
Dès lors, ce rendement étant quasiment optimal, on peut se dire que dans l’idéal, il serait bon que notre moteur soit situé aussi souvent que possible à ce point de fonctionnement.
Et lorsqu’on a récupéré cette information, on fait de même avec tous les autres composants de notre groupe motopropulseur : le contrôleur, le réducteur, et la batterie.
Il ne nous reste alors plus qu’à superposer toutes ces cartes.
Et on obtient une carte du rendement global de notre groupe motopropulseur, de la batterie à la roue.
Ça, c’est la partie qu’à peu près tout le monde connaît.
C’est devenu un standard : n’importe quel fournisseur sérieux de composants d’une chaîne de traction donne ces cartes.
Mais après avoir réuni ces cartes, le travail vient à peine de commencer. Car après avoir réuni ces cartes vient le temps de l’optimisation du rendement de notre groupe motopropulseur.
L’optimisation du rendement
Pour optimiser le rendement d’un groupe motopropulseur, il n’existe grossièrement que 2 manières.
(1) La première, c’est celle que j’ai évoquée en introduction — et qui a fait le succès d’Intel dans les 50 dernières années — qui consiste à améliorer les performances des composants.
Dans notre domaine, ça ne revient pas à utiliser des transistors plus petits, mais à améliorer la puissance spécifique ou la dissipation thermique de tous les éléments de notre chaîne de traction.
Le problème, c’est que cette manière est coûteuse en temps et en investissements.
Elle exige de longues périodes de recherche et développement ainsi que de mise en place de l’outil industriel, pour utiliser un matériau avec une meilleure perméabilité magnétique ou développer une géométrie nouvelle.
Cette manière est donc d’abord réservée aux grands groupes industriels qui ont les moyens de financer de telles recherches. Et cette manière est par défaut destinée à se cogner à un plafond technologique à un moment ou à un autre, qui ne pourra être cassé que par une nouvelle innovation de rupture.
En somme, cette manière ne m’est pas accessible.
(2) En revanche, la seconde manière est à la portée de ceux qui sont plus riches d’idées que d’argent sonnant et trébuchant.
Car cette manière est celle qui s’attache à accepter les performances des composants existants, pour chercher à les piloter de la manière la plus efficiente.
Si l’on reprend l’exemple de la carte de rendement que j’ai citée plus haut, cette manière revient à identifier des zones à éviter, et des chemins préférentiels à emprunter.
Finalement, cette manière est celle du “guide de montagne”.
Son rôle, c’est de connaître si bien la montagne qu’il vous indiquera le chemin le plus sûr et le plus efficace pour atteindre le sommet. Cette manière est donc celle du pilotage en bonne intelligence.
Et elle fonctionne !
Car si l’on reprend l’étude sur laquelle je suis tombée cette semaine, avec une chaîne de traction strictement similaire mais en utilisant un pilotage façon “guide de montagne”, on est capable de gagner beaucoup en autonomie.
En témoigne ce graphique, qui rassemble les résultats de l’étude :

Vous pouvez y voir l’évolution de la simulation de la consommation de puissance d’un quadricycle, dont les 4 moteurs-roues sont pilotés de 2 manières différentes :
Une manière équilibrée, où le couple demandé est égal dans chacun des 4 moteurs, à tout moment du cycle d’essai.
Et une manière optimale, où le couple demandé diffère dans les 4 moteurs, en fonction de la dynamique du véhicule en virages et en ligne droite, afin de minimiser le glissement des pneus (et donc les déperditions d’énergie).
Et ce que vous pouvez voir est indiscutable : il est permis, en contrôlant intelligemment les composants d’un groupe motopropulseur, de gagner 10% d’autonomie en se contentant d’utiliser un pilotage intelligent.
Un gain significatif, qui n’aura coûté que quelques lignes de code, et un peu de jus de cerveau. Alors que si l’on avait souhaité gagner autant en rendement en se concentrant sur une re-conception du moteur, on aurait dû s’y consacrer pendant 2 ans.
La seule stratégie à ma portée
Vous le savez, Ambre est encore une entreprise jeune.
Nous ne pouvons donc pas imaginer nous lancer dans une re-conception totale des composants qui équipent les premières briques technologiques que nous avons conçues, et qui se prélassent dans notre atelier.
En revanche, nous avons l’ambition de proposer le meilleur groupe motopropulseur sur sa catégorie. Nous devons donc travailler constamment à l’amélioration de son rendement, pour apporter des performances optimales.
En lisant cette étude, je me suis alors demandé ce que je pouvais d’ores et déjà implémenter sur notre conception.
Et j’ai eu quelques idées, que je trouve remarquables d’élégance.
Car elles ont une double qualité qu’en tant qu’ingénieur, on adore rencontrer :
Elles sont simples ;
Mais elles ont pourtant un potentiel d’amélioration du rendement global de notre groupe motopropulseur d’au moins 10%.
J’en parle ce dimanche, dans le rapport hebdomadaire du Club des Pionniers, pour récolter les avis des plus motivés d’entre vous :
Quand j’en ai parlé à
, notre premier ingénieur qui a longtemps travaillé sur les calculateurs Ducati, j’ai cru voir se regard s’éclairer. Gageons que ce regard sera partagé par tous ceux qui seront mis dans la confidence ce dimanche !Et en attendant de vous en dire plus, je vous souhaite un très bon week-end.
Julien