



Temps de lecture : 8 minutes.
Ce rapport hebdomadaire est destiné aux 216 pionniers.
Salut à tous,
En mai 2021, j’ai entamé mon étude de tous les moteurs électriques du marché.
J’ai consacré 6 mois à décortiquer toutes les technologies de moteurs électriques disponibles, à comprendre leur fonctionnement, et à dresser un tableau aussi précis que possible de leurs forces et de leurs faiblesses. Et j’avais, comme à mon habitude, publié toutes mes recherches sur mon site web.
Le moins qu’on puisse dire, c’est que ça a été un travail fastidieux.
Mais un travail fertile, puisque j’en suis ressorti avec une certitude : le moteur électrique le plus pertinent pour notre moto électrique est le moteur à induction.
Un choix que vous — les Pionniers — aviez également validé à cette même période.
Ça, c’est la partie émergée de l’iceberg.
Sauf que tout iceberg qui flotte sur nos mers septentrionales cache un volume immergé de glace. Un volume si grand que d’aucuns s’y sont cognés, surpris par l’énormité de la montagne gelée qui leur a fait barrage.
Dans ma recherche, je n’y ai donc pas manqué.
Je me suis cogné contre une masse immergée de glace bien plus grande que celle que j’avais aperçue au-dessus de la surface.
Et cette masse s’est concentrée autour d’une seule question, dont j’ignorais totalement l’explication physique jusqu’à récemment : comment expliquer la différence entre la puissance continue et la puissance en pic ?
Encore plus difficile : comment expliquer que cet écart ne soit pas égal chez tous les moteurs ?
Une explication macroscopique
Pour vous préciser l’ampleur de cet écart, le mieux est de prendre l’exemple du moteur à induction Mahle que nous allons installer sur notre prototype :
Sa puissance continue (tenue pendant 90 minutes) est de 4,7 kW ;
Quand sa puissance en pic (tenue pendant 60 secondes) est de 15 kW.
Soit un facteur 3 entre les deux puissances caractéristiques de notre moteur.
C’est énorme.
C’est si énorme que j’ai dû trouver aussi rapidement que possible une explication crédible à la présence de cet éléphant dans la pièce.
La première réponse que j’ai trouvée pour expliquer ce phénomène a alors été d’un ordre fonctionnel :
La puissance continue est simplement la puissance que le moteur est capable de fournir dans sa plage de rendement optimal ;
Et la puissance pic est celle qu’il peut fournir sans surchauffe.
J’ai conclu sur cette explication purement macroscopique, quand je suis tombé sur ce graphique que je vous ai partagé dans mes articles sur le sujet :

Sur ce graphique, on peut voir la courbe de couple continu (relative à la puissance continue donc) et la courbe de couple pic (relative à la puissance en pic), superposées à une carte du rendement du moteur.
Ce qu’on peut en tirer est très clair :
La courbe de couple continu se situe précisément aux zones de rendement maximal du moteur ;
Tandis que la courbe de couple pic est à la frontière de la surchauffe.
Voilà donc qui explique nettement la différence entre puissance continue et puissance en pic.
Enfin, en apparence.
Car si cette explication est très efficace pour faire de la vulgarisation, elle est largement insuffisante pour concevoir correctement une moto électrique. Et pour cause : elle se contente de décrire un phénomène, sans en comprendre les dessous.
Or au stade où j’en suis, il est parfaitement interdit de ne pas comprendre finement pourquoi la puissance en pic de notre moteur est 3x supérieure à sa puissance continue. Ça reviendrait à admettre que nous n’avons aucun moyen d’améliorer la propulsion de notre moto électrique. Ce qui est inadmissible dans une conception qui se respecte.
Alors depuis quelques semaines, je me suis lancé à la recherche du mécanisme physique qui explique ce fonctionnement.
Et je l’ai trouvé.
Il suffit de tracer une autre courbe
Cette réponse, je l’ai trouvée dans une courbe.
Une courbe totalement anodine du comportement d’un moteur électrique. Vous l’avez d’ailleurs peut-être déjà vue, puisque c’est la courbe qui trace l’évolution de la puissance maximale d’un moteur au cours du temps.

Sa forme est très caractéristique.
On peut voir dans cette courbe qu’au début, la puissance maximale qu’un moteur électrique est capable de tenir est la puissance en pic. Puis au bout de quelques minutes, la puissance s’écroule pour se stabiliser à la puissance continue.
Jusqu’ici, vous ne devez pas voir où je veux exactement en venir.
Mais laissez-moi agrémenter cette courbe de 2 autres courbes, qui décrivent ce qui se passe dans le moteur :
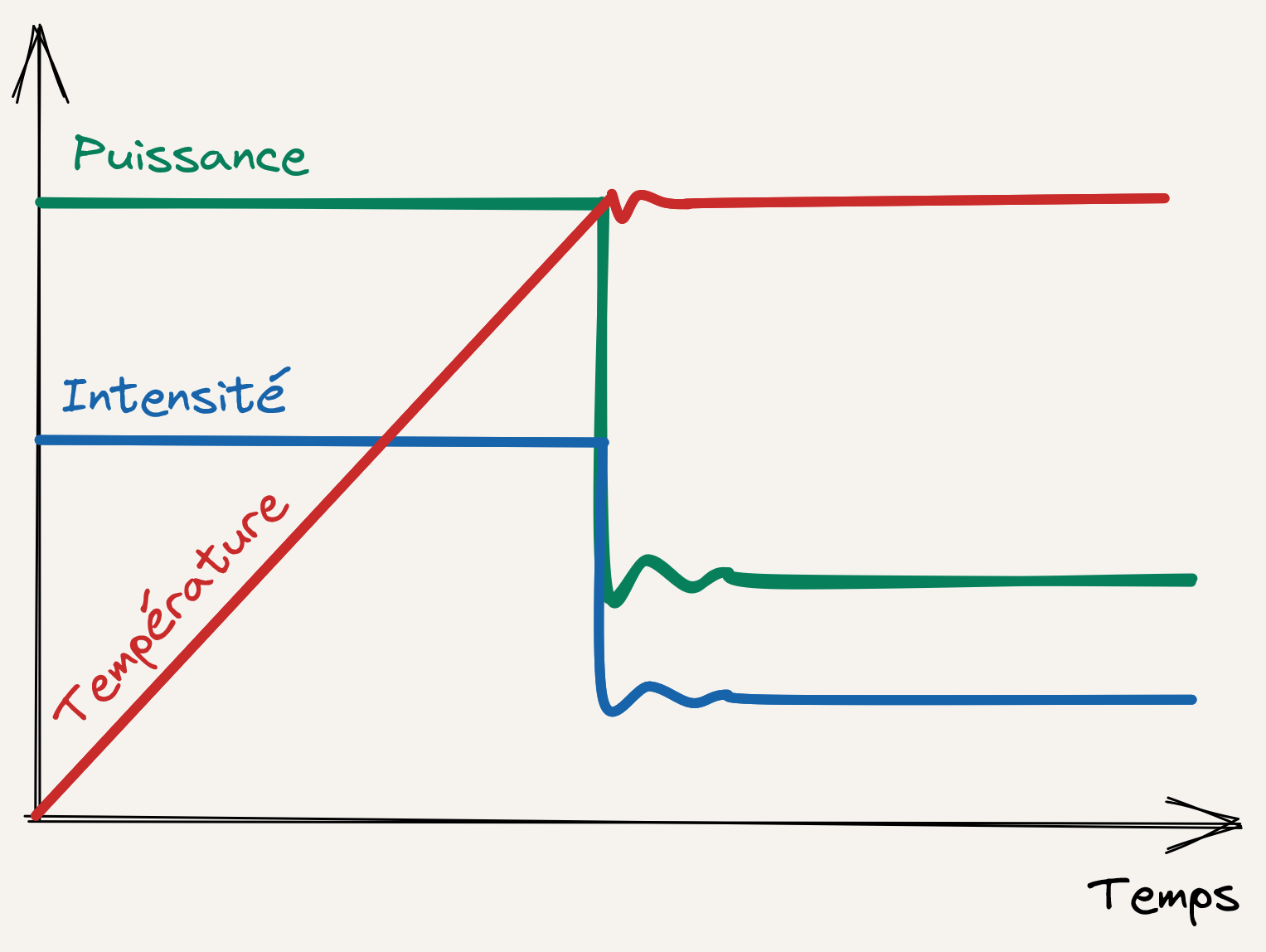
Ces 2 courbes supplémentaires sont celles de la température et de l’intensité d’alimentation de moteur.
En les voyant, vous devez mieux comprendre là où je veux vous amener.
En effet, cette superposition de courbes montre que la chute de puissance coïncide précisément avec le moment où la température du moteur atteint une certaine température limite.
À ce moment-là, l’intensité d’alimentation du moteur est divisée brutalement.
On voit alors que l’intensité oscille jusqu’à se trouver le niveau d’intensité qui permettra de se stabiliser à la température maximale autorisée.
Autrement dit, ces 3 courbes illustrent que dans un moteur électrique, la température est reine.
C’est elle qui pilote la puissance maximale d’un moteur :
Tant qu’on n’a pas atteint la température maximale autorisée, on peut se permettre d’alimenter le moteur à son intensité maximale et ainsi fournir la puissance en pic.
Puis quand on a atteint cette température critique, on bride le moteur jusqu’à trouver un nouvel état d’équilibre thermique qui correspond à la puissance continue.
Ça, c’est pour l’analyse prosaïque.
C’est une analyse fonctionnelle, puisqu’elle permet d’identifier mieux que précédemment cette différence de puissance que nous observons chez les moteurs électriques.
Mais à nouveau, cette analyse ne me suffit pas.
Et je fais bien de ne pas m’en satisfaire. Car quand je fais l’effort de creuser plus loin que cette analyse triviale, je tombe sur une lecture physique qui ne peut que ravir n’importe quel concepteur.
Cette lecture consiste à noter que le système moteur évolue selon deux régimes qui se succèdent :
Un régime transitoire (correspondant à la puissance en pic) ;
Et un régime permanent (correspondant à la puissance continue).
Dit sous ce prisme, ça peut paraître évident.
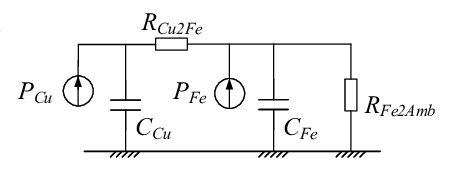
Mais si on continue de défaire cette pelote et qu’on a des bases en électrocinétique, on réalise que cette division en 2 régimes est une aubaine : elle permet de modéliser le comportement thermique de notre moteur en un circuit électrique équivalent.
Quelque-chose comme ça :
Je sais que cette révélation d’un circuit électrique équivalent peut en effrayer certains.
Pourtant, si j’oublie les complexités théoriques qu’elle implique (ceux qui voient arriver la fonction de transfert savent de quoi je parle), je ne peux que me réjouir.
Car cette modélisation permet de tirer 2 conclusions capitales :
La première, c’est que la puissance continue de notre moteur (régime permanent) ne dépend que de sa capacité à dissiper de la chaleur.
Ce qui laisse penser qu’en modifiant certaines pièces bien senties du moteur et en le positionnant au bon endroit sur notre moto, on pourra augmenter sa puissance continue.
La deuxième, c’est que le temps pendant lequel notre moteur est capable de tenir sa puissance en pic (régime transitoire) dépend à la fois de sa capacité à dissiper de la chaleur et de sa capacité à ne pas trop en stocker.
Eh bien là aussi, on peut imaginer modifier certaines pièces pour augmenter cette durée et repousser le moment où notre moteur perd en puissance.
Il ne reste qu’à modéliser
À ce stade, la marche à suivre est évidente.
Il faut modéliser notre moteur électrique, pour être capables de tracer par nous-mêmes toutes les courbes dont nous aurons besoin pour comprendre son fonctionnement.
De cette manière, on pourra jouer sur les différents paramètres à notre disposition pour améliorer ce moteur.
Et quand je parle de le modéliser, je parle vraiment de le modéliser entièrement.
Ça passe donc par le dessin en 3D de tous ces composants (il suffit d’acheter un moteur de Twizy d’occasion et le démonter pour y parvenir), ainsi que par la modélisation du système moteur.
J’aurai l’occasion de vous en parler beaucoup plus en détail dans les prochaines semaines. Il y a mille choses à faire sur le sujet, et je vous partagerai tout ce que j’en tirerai.
Mais au moment où j’écris ces lignes, je me souviens quand je vous disais que le salut de notre moto électrique passait par l’allègement de son moteur Mahle.
C’était il y a presque un an.
À cette époque, je ne savais pas exactement comment m’y prendre pour l’alléger.
Eh bien, le moment est venu de trouver. Et ça commence par la modélisation de notre moteur, à la lumière de ce mécanisme thermique que je vous ai décrit dans ce rapport hebdomadaire.
Bon dimanche,
Julien