
Les leçons douloureuses de la modélisation des suspensions
Mais un chapitre important qui se clôture

Temps de lecture : 14 minutes.
Ce rapport hebdomadaire est destiné aux 208 pionniers.
Salut à tous,
Depuis que l’année universitaire s’est clôturée — et que ma mission d’enseignant-chercheur s’est clôturée par la même occasion — j’ai la très agréable impression que le temps se rallonge.
Je dispose dorénavant d’une quantité astronomique de temps.
Tous les matins, quand j’arrive au bureau, je n’ai plus besoin de préparer les cours que je dois donner le lendemain, de creuser un sujet qui a été soulevé pendant un précédent cours, et de prévoir un créneau de 2h30 d’enseignement au milieu de la journée.
Je découvre les joies de ne plus cumuler 3 métiers.
Quel plaisir !
La contrepartie, c’est que je ne peux plus jouir des avantages d’un enseignant-chercheur. Par exemple, je ne profite plus de la discussion constante que je nourrissais avec mes étudiants, qui me posaient mille questions auxquelles je me faisais un plaisir de répondre par des monologues qu’Edmond Rostand n’aurait même pas osé donner à son Cyrano.
Si je doute encore de ce que les étudiants tiraient de mes tirades, je sais aujourd’hui qu’elles me faisaient gagner un temps inestimable.
Car leurs questions naïves cachaient toujours une profondeur de réflexion impressionnante.
Par exemple, ils me provoquaient très souvent en me disant que la plupart des méthodes analytiques que je leur apprenais pour résoudre des problèmes mécaniques pouvaient être remplacées par des logiciels de simulation numérique.
Et ils avaient raison !
Je veux dire, pourquoi s’embêter à poser un problème complexe sur papier et suer à grosses goutes pour en extraire une solution incertaine, quand un logiciel spécialisé peut accoucher d’une solution en quelques fractions de seconde ?
J’adorais ce genre de questions.
Car ça me permettait de leur rappeler que nul ne peut espérer utiliser correctement un logiciel sans en comprendre les rouages.
Et donc qu’un logiciel, reposant lui-même sur des calculs analytiques, doit toujours être accompagné d’une étude analytique indépendante du logiciel. En somme, je les enjoignais à positionner le logiciel comme un outil dont ils devaient être les maîtres.
Puis, je concluais élégamment en leur demandant de rester sur leur qui-vive.
Car il n’y a pas plus pernicieux qu’un logiciel spécialisé. Il occupe son temps à tenter ses propriétaires de lui confier toujours plus de tâches. Et sans le réaliser, en quelques mois, on devient exclave de son logiciel.
Incapable de poser soi-même le cadre de l’étude, on se métamorphose en un presse-bouton nigaud au service d’un logiciel décisionnaire.
C’est le cauchemar de l’ingénieur.
Et pourtant, malgré les avertissements que je serinais à l’envie à mes étudiants, j’ai fini par me laisser surprendre.
Je me suis laissé moi-même surprendre par un logiciel dont je fais l’éloge depuis quelques temps — ce qui, vous en conviendrez, est comique. Toujours se méfier des donneurs de leçon. Aussi professeurs en école d’ingénieur qu’ils puissent être, ils finissent toujours par trahir les préceptes qu’ils enseignent.
Ça m’est arrivé, mais je ne m’y referai plus prendre.
Les éléments de la suspension d’une moto
Il y a 2 semaines, après avoir largement entamé la modélisation de notre groupe motopropulseur sur OpenModelica, je me suis dit qu’il était nécessaire de ne pas laisser trainer la conception mécanique de notre prototype.
M’est alors revenu le rapport hebdomadaire que j’avais consacré à la suspension arrière de notre prototype industriel.

Dans ce rapport hebdomadaire, je faisais le récit d’une découverte qui m’a frappé lorsque j’ai voulu positionner l’amortisseur arrière de notre prototype industriel : ça n’a rien de trivial.
Vraiment, c’est tout sauf simple.
Alors pas plus bête qu’un autre, je me suis dit que la première étape de modélisation de la conception mécanique d’un prototype industriel était celle des suspensions. Car si c’est difficile, il est toujours bon de prendre de l’avance et de se décharger d’une tâche laborieuse aussi tôt que possible.
Il y a 2 semaines, je me suis donc lancé sur ce sujet.
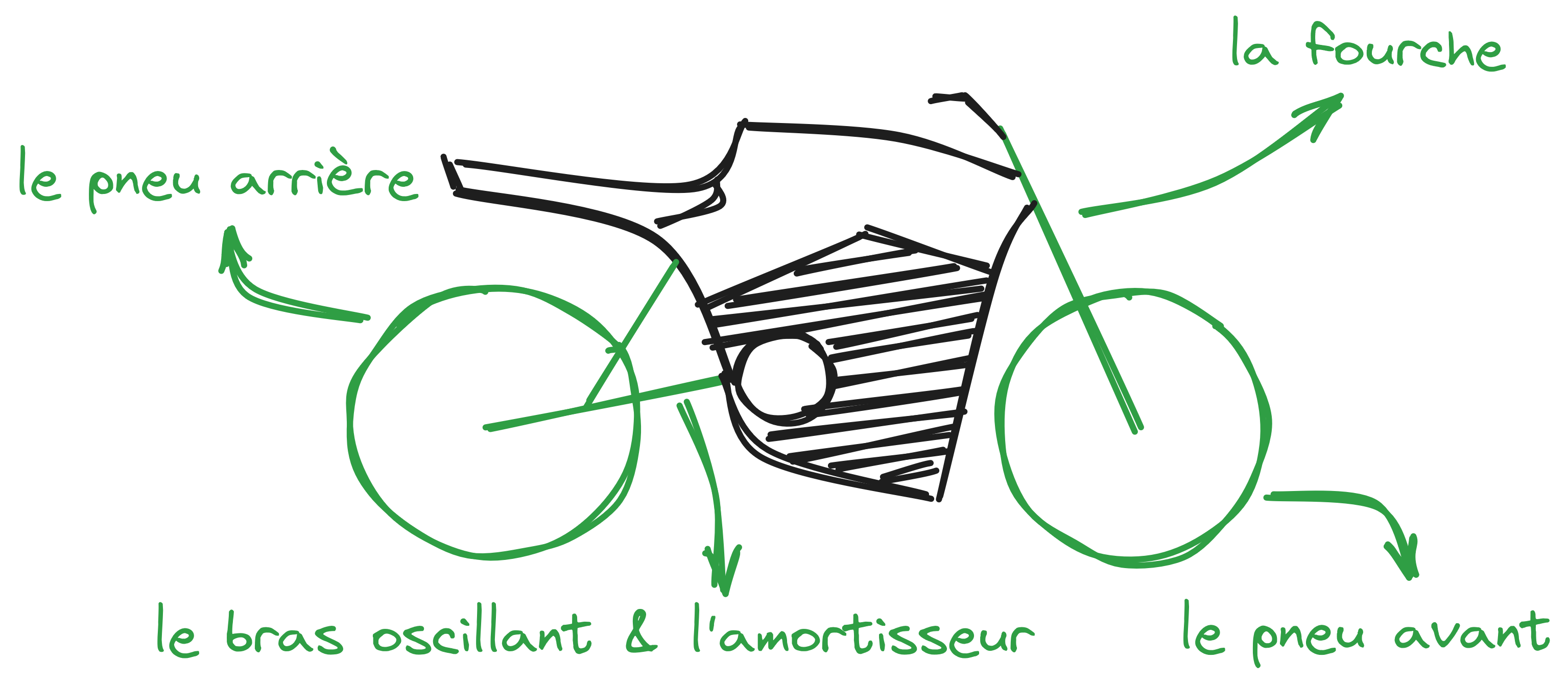
Je me suis armé de feuilles blanches, d’un critérium gonflé de mines neuves, et j’ai commencé à dessiner la silhouette d’un prototype industriel de moto :

La suite a alors consisté à faire l’inventaire de tous les éléments de ce prototype industriel que je dois intégrer dans mon étude pour modéliser sa suspension.
J’en ai compté 4.
D’abord, les plus évidents :
La fourche, évidemment ;
Et l’ensemble bras oscillant & amortisseur arrière.
Ces deux éléments ne sont absolument pas une surprise. On sait pertinemment qu’ils interviennent dans la suspension d’une moto électrique puisque c’est précisément leur rôle : suspendre la moto.
En revanche, les 2 autres éléments sont moins évidents.
Car s’ils impactent la suspension du prototype, c’est bien malgré eux. Mais étant eux-mêmes souples, et étant ceux qui transmettent les vibrations du sol au reste du prototype, ils ont leur rôle à jouer.
Vous les aurez peut-être reconnus, car ces deux éléments sont :
Le pneu avant;
Et le pneu arrière.
Voilà qui est utile.
Car à partir de cet inventaire des éléments en présence, j’ai pu modéliser la suspension du prototype en écumant ce qui ne sert à rien, et en schématisant ce qui entre en jeu.
Dessiner le modèle le plus fidèle
Lorsqu’on s’intéresse à la modélisation du comportement vibratoire d’un objet, on essentialise les éléments qui le composent en 3 catégories. De cette manière, on se départit du superflu et on ne garde que ce qui participe à la vibration.
Ces 3 éléments sont les suivants :
Il y a d’abord les masses, qui consistent à observer que si on change la masse d’un objet, il vibrera différemment puisqu’il aura une inertie différente.
Il y a ensuite les ressorts, qui consistent à comprendre que si on change la souplesse d’un objet (ou sa raideur), il vibrera différemment puisqu’il stockera plus ou moins d’énergie.
Et il y a enfin les amortisseurs, qui consistent à remarquer que si on change la viscosité d’un objet, il vibrera différemment puisqu’il dissipera plus ou moins d’énergie.
Ces 3 éléments sont suffisants pour modéliser n’importe quel comportement vibratoire de n’importe quel objet. Aussi complexe soit-il, il pourra toujours être divisé en un assemblage de masses, de ressorts et d’amortisseurs.
Si je reprends mon schéma précédent, je peux alors dessiner le modèle le plus fidèle de ce prototype industriel en un assortiment de masses, de ressorts et d’amortisseurs :
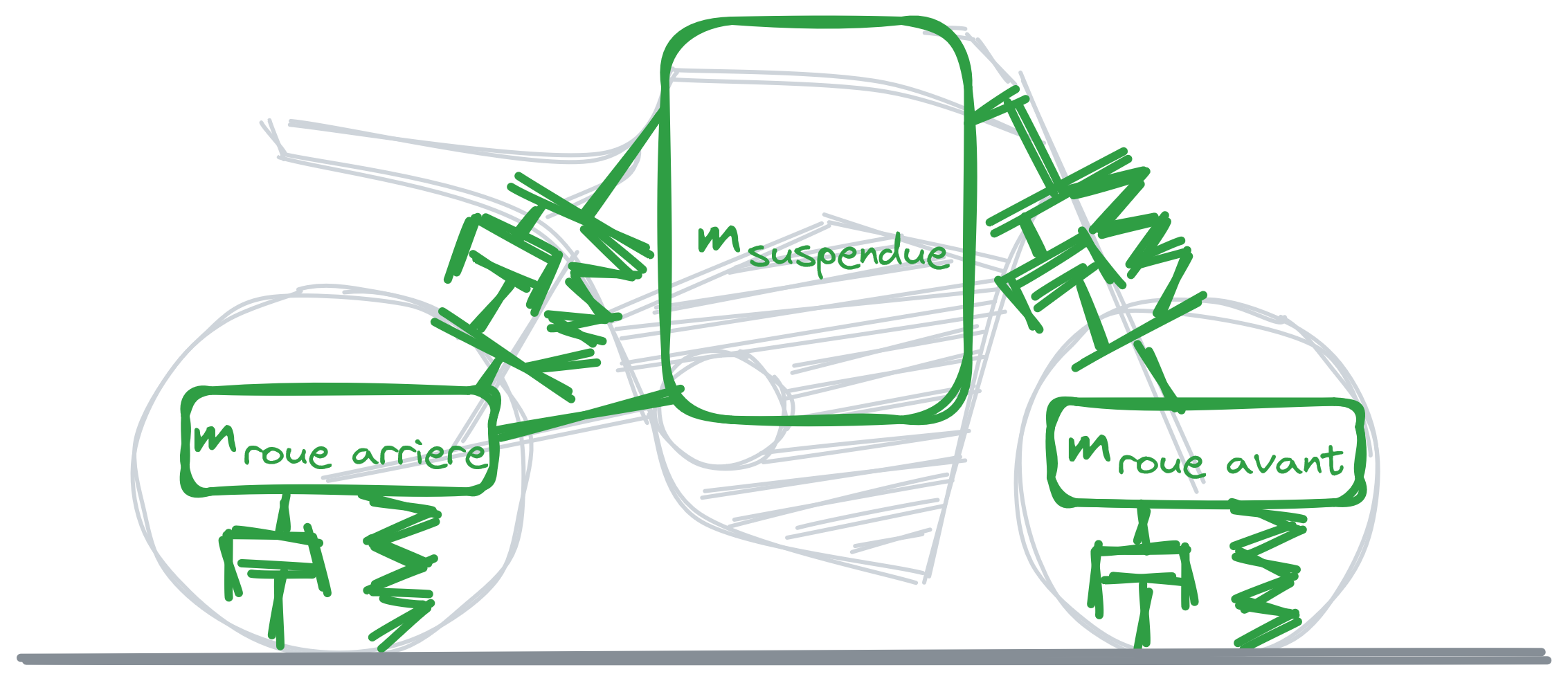
Sur ce schéma, vous pouvez reconnaître les composants en jeu dans un prototype de moto électrique.
Vous pouvez donc y retrouver la masse de la roue avant, de la roue arrière, et du reste de la moto, ainsi que les 4 ressorts (dessinés comme des zigzags) et les 4 amortisseurs (dessinés comme des pistons).
Lorsque cette schématisation est posée sur le papier, l’étape suivante semble immédiate : il suffit de prendre ce schéma et de le traduire sur n’importe quel logiciel de modélisation.
C’est évidemment ce que j’ai fait.
Je me suis rendu sur le logiciel OpenModelica dont je vous fais l’éloge depuis des mois, j’ai ouvert une page vierge dans l’arborescence à gauche de l’écran, et j’ai commencé à traduire le schéma précédent dans le langage d’OpenModelica.
Le premier jour, j’étais euphorique.
Je me suis lancé à corps perdu dans la modélisation de la suspension de ce prototype industriel, en me réjouissant dès qu’une nouvelle subtilité se révélait à moi.
Jusqu’à ce qu’à la fin, la somme des subtilités que j’avais identifiées paralysent complètement mon avancée. Ma modélisation venait de se faire écraser par une quantité parfaitement imprévue de complications.
En détails :
J’ai rapidement remarqué que l’angle de chasse du prototype (donc l’inclinaison de la fourche) avait un impact important sur son comportement vibratoire.
J’ai aussi pressenti que la longueur et l’inclinaison du bras oscillant auraient une incidence non-négligeable sur les vibrations transmises par la roue arrière au reste de la moto.
Je me suis également souvenu que la localisation et l’inclinaison de l’amortisseur arrière allait largement influencer les caractéristiques de la suspension arrière.
Puis j’ai constaté que selon la position du centre de gravité et les efforts transmis par les suspensions avant et arrière, la répartition de la masse entre l’avant et l’arrière du prototype allait évoluer pendant le trajet.
J’ai par ailleurs découvert que la dissipation d’énergie par les pneus était variable selon les conditions, m’obligeant à chercher dans la littérature scientifique comment assimiler cette information.
J’ai évidemment retrouvé la prévalence de la précontrainte des ressorts de suspension sur la dynamique de la moto.
Et enfin, j’ai constaté que les amortisseurs aussi dissipaient l’énergie de manière différentielle.
Si bien qu’après presque 2 semaines de bras de fer acharné avec OpenModelica, j’ai dû me résoudre à accepter ma défaite.
Il est impossible, avec les compétences qui sont les miennes, de modéliser la suspension d’un prototype avec autant de finesse que ce que j’espérais initialement.
J’ai douloureusement appris que les composants de base d’OpenModelica (les seuls que je maîtrise) refusent de faire évoluer les masses avec le temps, d’imposer des caractéristiques d’amortisseurs variables, et d’incliner les ensembles ressorts/amortisseur.
Mais ce n’est pas tout ce que j’ai appris.
Car en même temps que j’ai baissé les armes face à OpenModelica, j’ai compris que je m’étais perdu dans un délire fétichiste d’ingénieur. Je me suis laissé aspirer par le vortex de la complexité théorique, sans réaliser que cette complexité était superflue.
Ce dont j’ai réellement besoin
Si je devais résumer les conversations que j’ai eues avec mes étudiants, en une seule phrase, je crois que je choisirais celle-là : en ingénierie, on doit se concentrer sur la réponse à un besoin.
Et sur rien d’autre !
Tout ce qui nous écarte de la réponse à ce besoin (un logiciel par exemple, ou une démence fanatique d’ingénieur) doit être tué dans l’oeuf.
Quand j’ai réalisé que j’étais tombé dans le piège de la divagation superflue, je me suis rappelé de cet impératif et j’ai cherché à me remémorer le besoin auquel j’essaie de répondre avec les suspensions de ce prototype.
Ce besoin est double, comme je l’avais évoqué dans mon très lointain article consacré aux suspensions des motos (à l’époque où j’étais encore très débutant dans le domaine, où je faisais quelques confusions, et où mon lyrisme flirtait avec l’indécence).
Dans cet article, je divisais le rôle des suspensions en 2 pôles :
D’abord assurer l’intégrité de la moto (en la protégeant des phénomènes délétères de résonance) ;
Et ensuite garantir le confort du conducteur (en limitant l’intensité des vibrations).
Par chance, je suis toujours d’accord avec cette division en 2 pôles.
Quand j’en reviens au besoin auquel nos suspensions doit répondre, c’est donc à ce bi-objectif que je dois me soumettre. Et puisque la modélisation de la suspension est censée elle aussi répondre à ce bi-objectif, elle n’a aucune raison d’en faire plus.
Sous ce prisme, la modélisation des suspensions telle que je la conçois doit donc répondre à seulement 2 questions :
Les suspensions que j’ai choisies amortissent-elles suffisamment les vibrations à toutes les fréquences pour ne pas endommager la moto ?
Et quelle est l’accélération verticale maximale que le conducteur ressentira à cause des vibrations ?
C’est donc ce que j’ai fait.
Et en moins d’un jour et demi, j’ai pu finir la modélisation minimale qui me permettra de répondre à ces 2 questions, en fonction des choix de suspensions que nous aurons faits.
Dorénavant, dès que je fais varier un seul paramètre du prototype (ses différentes masses, ses pneus, ses suspensions, sa géométrie), je peux répondre en quelques secondes aux 2 questions qui viennent d’être posées.
Avec des approximations, évidemment, mais avec une précision suffisante.
Le sujet des suspensions de notre prototype est derrière nous
Ainsi se termine le chapitre que j’avais entamé il y a quelques mois, lorsque j’ai commence à dessiner la plateforme mécanique du groupe motopropulseur de notre prototype industriel.
J’ai ouvert ce chapitre quand j’ai réalisé à quel point la suspension arrière d’un prototype industriel avait un impact sur son architecture mécanique. À un tel point que j’ai dû mettre en pause la conception de la plateforme mécanique pour crever cet abcès que je n’avais pas vu venir.
Mais aujourd’hui, l’abcès est crevé.
Grâce à la modélisation des suspensions du prototype que j’ai faite sur OpenModelica, je peux maintenant me plonger pour de bon dans ce que je sais le mieux faire : de la conception mécanique qui tâche.
Celle qui consiste enfin à concrétiser les pistes de réduction du poids de notre prototype que j’ai identifiées pendant les mois qui viennent de s’écouler.
Car là aussi, il s’agit de s’en souvenir : si nous n’arrivons pas à baisser le poids de notre prototype, nous aurons perdu notre pari.
Alors le temps est venu de s’y consacrer, pour de bon.
Bon dimanche,
Julien